Simultaneous Localization and Parameter Estimation for Single Particle Tracking via Sigma Points based EM
[Abstract] - Single Particle Tracking (SPT) is a powerful class of tools for analyzing the dynamics of individual biological macromolecules moving inside living cells. The acquired data is typically in the form of a sequence of camera images that are then post-processed to reveal details about the motion. In this work, we develop an algorithm for jointly estimating both particle trajectory and motion model parameters from the data. Our approach uses Expectation-Maximization (EM) combined with an Unscented Kalman filter (UKF) and an Unscented Rauch-Tung-Striebel smoother (URTSS), allowing us to use an accurate, nonlinear model of the observations acquired by the camera. Due to the shot noise characteristics of the photon generation process, this model uses a Poisson distribution to capture the measurement noise inherent in imaging. In order to apply a UKF, we first must transform the measurements into a model with additive Gaussian noise. We consider two approaches, one based on variance stabilizing transformations (where we compare the Anscombe and Freeman-Tukey transforms) and one on a Gaussian approximation to the Poisson distribution. Through simulations, we demonstrate the efficacy of the approach and explore the differences among these measurement transformations.
[Main idea] -
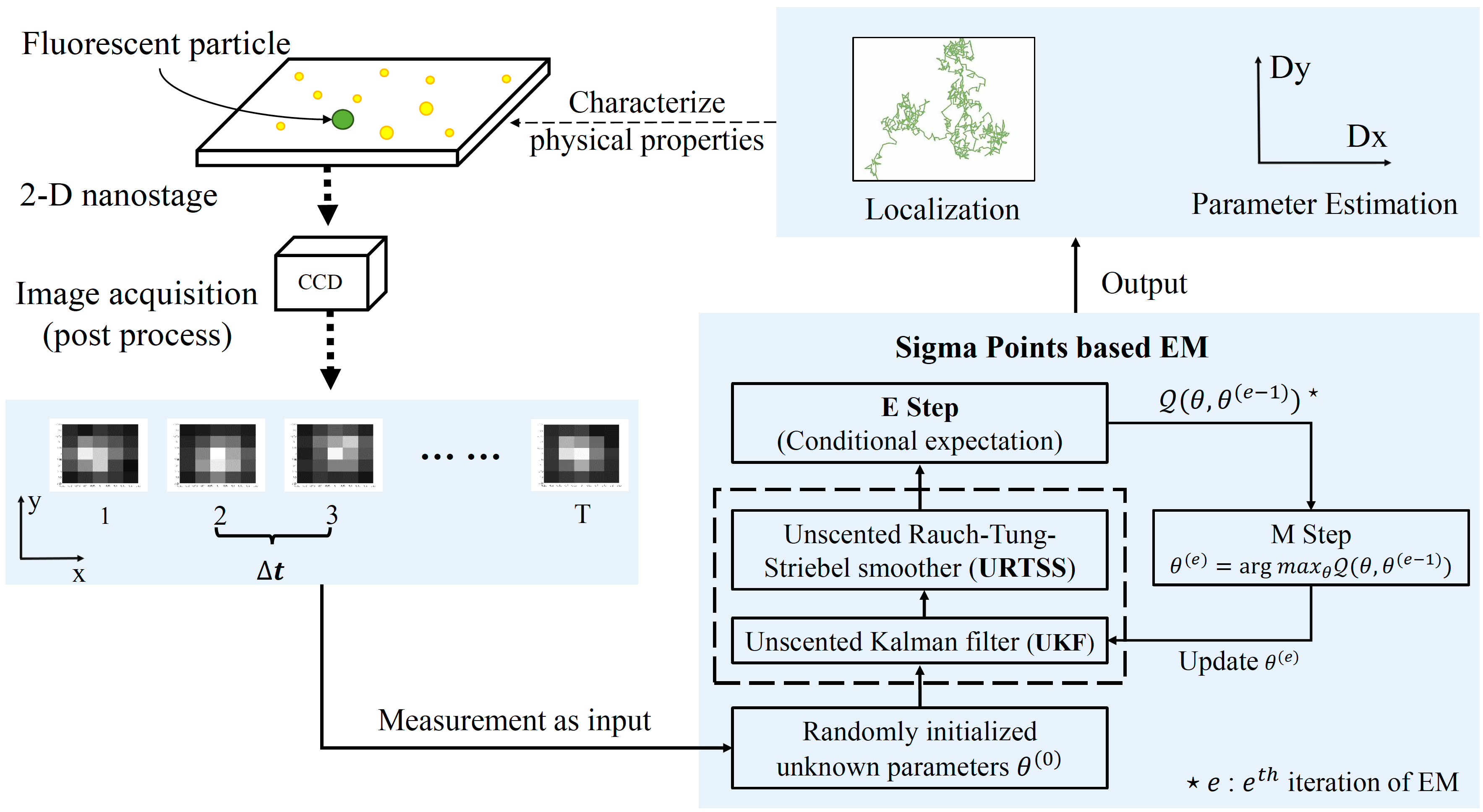
[Example of measurement] -
[Reference] -
@inproceedings{lin2019simultaneous,
title={Simultaneous Localization and Parameter Estimation for Single Particle Tracking via Sigma Points based EM},
author={Lin, Ye and Andersson, Sean B},
booktitle={2019 IEEE 58th Conference on Decision and Control (CDC)},
pages={6467--6472},
year={2019},
organization={IEEE}
}

{kind=link}